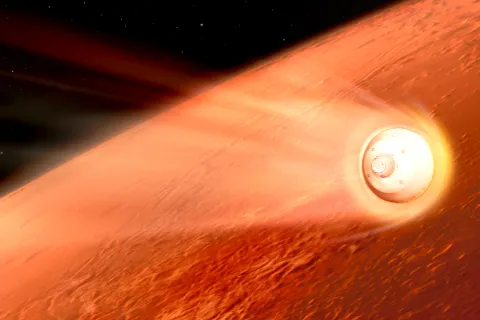
We work on aerospace systems that include networks of satellites circling the earth, spacecraft going beyond our orbit, machines that can perform complex tasks in space like fixing or assembling crafts, space stations, and other equipment, and even rovers on the Moon, Mars, or asteroids. These autonomous and robotic machines must work remotely, often without direct inputs, not knowing exactly what they will come across. They must navigate to avoid crashing into each other or other obstacles. We develop algorithms and software that work for guidance, navigation and control and enhance the stability, performance and robustness of these systems. Figuring out how to do all of these things well in space means that we can improve our autonomous and robotic systems here on earth as well.
Associated faculty
Key labs
- Active Aeroelastic Structures Lab
- Autonomous Control Laboratory
- Control and Trustworthy Robotics Lab (CTRL)
- The illimited Lab
- Multiscale Analysis of Materials & Structures (MAMS)
- Nonlinear Dynamics and Control Lab
- Robotics, Aerospace, and Information Networks (RAIN) Lab
Student club highlight
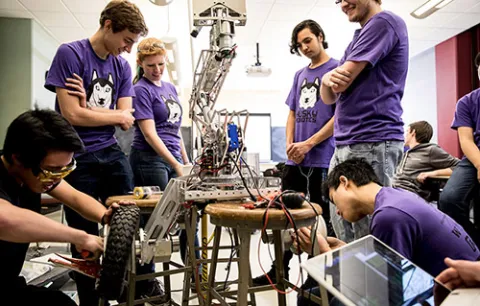
Husky Robotics
Husky Robotics designs, builds, programs and competes Mars Rovers in simulated missions while providing students with experience in machining, circuit design, coding and project management.