
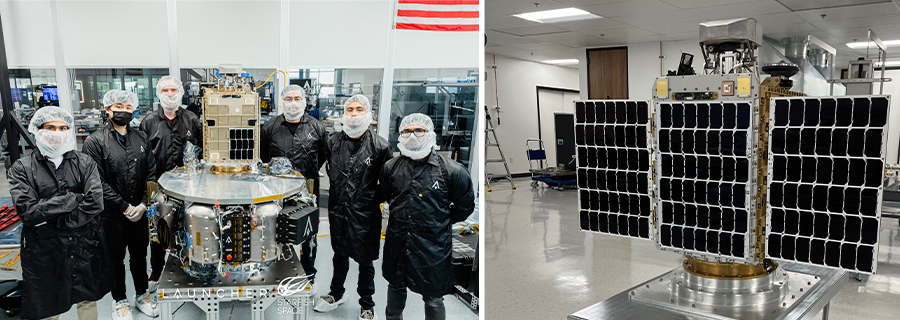
Left: A Starfish Space team with the Otter Pup and its launcher. Right: A closer view of the Otter Pup.
It’s hard to catch a satellite
Rendezvous and docking with a satellite is not easy. Satellites travel at about seven kilometers per second, or about 16,000 miles per hour in slightly changing orbits. Not only do the two satellites have to meet at this high speed, but, if they are docking, they need to meet gently from their different orbits.
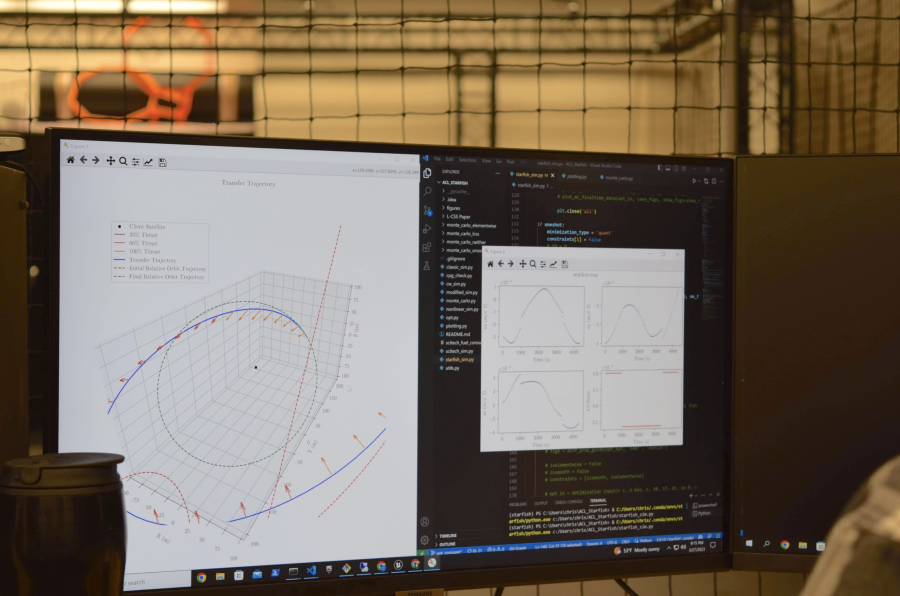
Viewing the trajectory simulations in the Autonomous Controls Lab
Typically for a rendezvous, a spacecraft will use chemical thrusters to guide it through point maneuvers. These are a set of predetermined points in space used as reference points to ensure correct positioning for the two spacecraft to approach each other. Mittal explains, “You’ll have these different orbits that you can stitch together and find the intersections.”
Starfish Space, however, plans to use electric propulsion instead of chemical propulsion because of its tremendous advantage in efficiency and cost savings. But using electric propulsion creates an additional challenge of catching the satellite. Mittal goes further, “With electric propulsion, the satellite accelerates relatively slowly with long continuous burns instead of the usual point burns with chemical thrusters. Now we don’t have these predetermined orbits that we can just stitch together. It’s much more difficult to solve.”
Another challenge to sort out is thrust. Chemical thrusters are usually either on or off. Pulsing them produces the effect of variable throttle. Electric thrusters are capable of continuous throttle, but manufacturers don’t generally plan for this, so Starfish Space plans to use a few preset levels of thrust to bridge this gap. This means that the solution must account for these various quantized levels.
Related story
Space systems
Nailing the landings in space
A&a is solving the challenges of how and where to land on the moon, mars and beyond.
Computer-simulated trajectories for three different maneuvers at varying electric propulsion thrust levels - drift cancel, plane change and non-planar shift.
Simplifying the equation with the Autonomous Controls Lab
Bennett knew the advantage of being able to collaborate with the ACL. He says, "The increased complexity of using electric propulsion and the accumulation of orbital perturbations during thrust arcs, clever optimization techniques are all the more important.". The Autonomous Controls Lab is one of the premier groups working on a type of optimization called convexification.”
He continues, “Basically, ACL has shown you take a really complicated problem that has too many inputs and variables, you simplify it to something that is close, and you solve that problem and use it as a best guess to solve the harder problem. If you use these best guesses enough times in a row, you’ll actually get very close to what it would take to solve the full problem with a lot less effort on the computer.”
A&A researchers Chris Hayner, Kazuya Echigo and Avi Mittal in the Autonomous Controls Lab.
Now Mittal, along with fellow ACL researchers Echigo and Hayner, are working on adapting their algorithms to account for the various constraints of electric propulsion.
Echigo translates the problem into mathematical theory. He explains how the real equation to solve is non-convex and, therefore, extremely difficult to solve. To find the solution, he went back to fundamental theory and developed a specific convex cost function while using convex equations of the constraints: orbital dynamics, control input (thruster levels), the state (position and velocity), and boundary conditions. Because these are solvable, they serve as a proxy for the more complex problem.
He says, “The results are the same, which is ‘theoretically guaranteed’ under some conditions. Thanks to the cost function, which promotes the results to satisfy non-convexities, we can get a solution by just solving convex optimization. This is the advantage of convexification.”
Mittal and Hayner then get to work on simulating Echigo’s solution. Mittal details the process, “One: We have to turn Kazuya’s math into something the computer can handle. Two: We simulate it. And three: We characterize where the system breaks down.”
They go to work setting up as many simulations as possible. Their program may run through 200,000 simulations overnight to verify that the control works for various conditions. Right now, over 99 percent signal a successful rendezvous.