
March 5, 2026
Spencer Kraisler (A&A Ph.D. '26, Math B.S. '21) is A&A’s 2026 Condit Fellow. Kraisler's selection honors research that demonstrates a rare combination: the theoretical depth to see aerospace problems through the language of manifolds, and the scholarly curiosity to unearth forgotten solutions in decades-old papers that were decades ahead of their technological time.
A manifold is a mathematical space that is curved on a large scale, but resembles a flat space from each point on it on a smaller scale, much like Earth appears flat to us when we’re on it, but is obviously spherical from a distance. Mathematically, on the local scale, linear analysis applies. Spencer Kraisler realized, though, that the range of solutions for spacecraft trajectories and other controls problems actually lie on a manifold, reducing the pool of possible solutions. The result is dramatically faster algorithms used to solve these complex problems.

Spencer Kraisler
A mathematician's view of spacecraft
Spencer Kraisler has an affection for spheres. His unique perspective stems from his UW undergraduate mathematics training in manifold theory, the study of smooth, curved spaces. While traditional control engineers typically view systems through the lens of linear algebra, Kraisler sees them differently.
"The set of orientations of a satellite is actually a manifold," Kraisler explains. In his dissertation, "Controller Synthesis through Riemannian Optimization," he argues that many spaces in control theory, which governs everything from autonomous vehicles to spacecraft guidance, are fundamentally Riemannian—geometric spaces where distances and angles can be measured along curved surfaces.
A sphere is one example of a manifold. Understanding that the solution will lie on the manifold will speed up computations dramatically.
If you know that your solution will be on the "surface" of the manifold, then you eliminate searching through a much larger Euclidean space. "Using the standard gradient descent, you're searching along every direction," Kraisler notes. "Using Riemannian gradient descent, you're only searching through directions that meet your constraints, which is a much smaller space."
An award-winning speed record in control theory
For his first major project, Kraisler worked with Professor Mehran Mesbahi to tackle Linear-Quadratic-Gaussian (LQG) policy optimization, a fundamental problem in control theory. Traditionally, engineers compute the most optimal algorithm, or “controller” by solving complex matrix equations. More recently, researchers have turned to optimization methods rather than algebra, hoping to adapt these techniques for AI applications through the so-called reinforcement learning. But the optimization approach is often slow and offers no guarantees on finding the optimal solution due to the intricate optimization landscape.
What is a feedback controller?
A feedback controller is an algorithm that runs in a continuous loop: measures the system's current state, computes the optimal input, applies that input, and then repeats. For a spacecraft, the state includes position, velocity, and orientation. The input is the commanded thrust and torque. The controller's job is to figure out exactly how much thrust and torque to actuate, and when, to achieve the mission goal as efficiently as possible. Aerospace engineers often use “controller,” “algorithm” and “policy” interchangeably.
Kraisler suspected that his manifold theory training could make the process faster. He also suspected that others might have explored similar geometric insights before that would apply to this current problem. With assistance from University librarians, he began digging into physical paper copies of research from the early days of geometric nonlinear control and system theory.
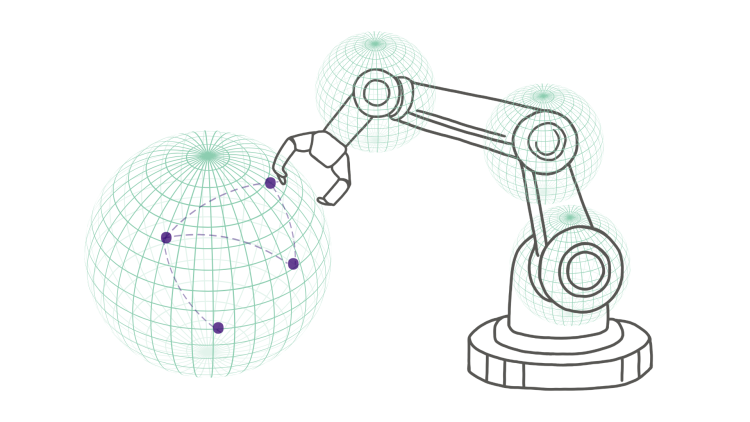
In this visualization, the possible orientations at every joint would mathematically lie on a manifold. Similarly, the possible reaches of the arm would also lie on a manifold.
Manifold theory pioneers like P.S. Krishnaprasad and C.F. Martin published papers in the 1980s that explored the relationship between global topological properties of manifolds of linear systems and basic questions in linear system theory that would apply to controllers. But at that time, the computing power required to implement their complex geometric insights simply didn't exist.
Kraisler proved these researchers had been correct all along. Now, with modern computing power and Kraisler's ability to translate these classic theories into contemporary computational language, the time had finally come.
Kraisler implemented his Riemannian Gradient Descent (RGD) approach in Python. His algorithm, which he named the Krishnaprasad-Martin Metric after the 1980s theorists, solves for the policy you set—balancing objectives like fuel usage against the speed of achieving a maneuver. The possible solutions lie on a manifold of stabilizing policies, which means far fewer possibilities to search through.
The results were so dramatic they initially caused Kraisler to worry. "I thought it would be faster, but to my wild surprise, it was way, way faster," he recalls. "I thought it was broken."
He validated his work by comparing it against traditional optimization solutions and testing it against standard gradient descent across multiple systems. His approach easily outperformed ordinary gradient descent and successfully avoided common points where conventional methods often get stuck. The work earned Kraisler the best student paper award at the 2024 IEEE Conference on Decision and Control in Milan.
“For a long time, we've approached control design assuming flat, linear spaces. But Spencer has shown that when you model these problems using curved spaces, the way Einstein modeled spacetime, you can solve fundamental questions in controls much more elegantly.”
Doubling the speed for spacecraft guidance
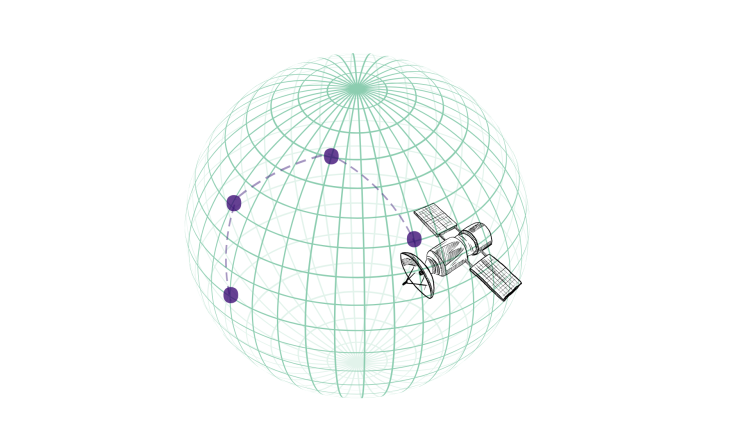
The set of satellite orientations and trajectories also mathematically lie on a manifold. Reducing the set of possibilities in an algorithm to those on the manifold drastically speeds up the results and makes the algorithm capable of running on a basic laptop.
Building on that success, Kraisler worked with Professor Behçet Açikmeşe to improve spacecraft attitude guidance—the complex task of maneuvering a satellite while avoiding pointing sensors at the sun. The industry standard, Successive Convexification (SCvx) developed in our Autonomous Controls Lab, was already used by companies like SpaceX and Blue Origin, but Kraisler thought that his manifold theory training could make it faster because, again, the solution lies over a smaller dimensional space.
While SCvx works well, Kraisler recognized the hidden inefficiency. The standard algorithm uses a 4-parameter representation to track the satellite's orientation, even though orientation is a 3-dimensional quantity. This extra dimension provides algorithmic simplicity but creates inefficiency in finding a solution.
His innovation was Intrinsic Successive Convexification (iSCvx), which achieved twice the speed of the state-of-the-art method for spacecraft guidance. By working directly in the 3D rotation space and rather than the oversized 4D representation and only looking for solutions on a manifold, the optimizer uses less memory and reaches the fuel-optimal path in significantly fewer iterations. The result is an algorithm that runs twice as fast as SCvx.
Kraisler has an ability to take mathematical concepts and prove they work in high-stakes aerospace contexts. His research demonstrates that exploiting the intrinsic manifold structure yields algorithms that are an order of magnitude faster than the current algorithms flying in space now.
Professor Mesbahi puts Kraisler’s work into perspective, "For a long time, we've approached control design assuming flat, linear spaces. But Spencer has shown that when you model these problems using curved spaces, the way Einstein modeled spacetime, you can solve fundamental questions in controls much more elegantly. It's a different way of looking at the problem entirely, and it's proving to be really powerful. We're already seeing followers of this line of work across computer science, machine learning, and controls. It's not the dominant paradigm yet, but that's changing."
The Condit Fellowship, made possible through Phil and Geda Condit's generous support, recognizes exceptional doctoral candidates who demonstrate outstanding academic achievement and research potential in aerospace.
Go to the sources
S. Kraisler and M. Mesbahi, "Output-Feedback Synthesis Orbit Geometry: Quotient Manifolds and LQG Direct Policy Optimization," in IEEE Control Systems Letters, vol. 8, pp. 1577-1582, 2024, doi: 10.1109/LCSYS.2024.3414962.
S. Kraisler, M. Mesbahi and B. Açıkmeşe, "Intrinsic Successive Convexification: Trajectory Optimization on Smooth Manifolds," in IEEE Control Systems Letters, vol. 9, pp. 408-413, 2025, doi: 10.1109/LCSYS.2025.3571671.