
Abhinav Kamath and Purnanand Elango enrolled in our doctoral program and joined the Autonomous Controls Lab (ACL) because they knew A&A researchers have an impressive track record in revolutionizing powered-descent guidance (PDG). And now, under Professor Behçet Açıkmeşe’s guidance and with support from A&A alum Yue Yu, labmates Taewan Kim and Skye Mceowen, Professor Mehran Mesbahi, and John M. Carson III and others from the NASA Johnson Space Center, they have broken a long-standing barrier of the field: executing onboard spacecraft decisions for powered-descent in less than one second. This breakthrough opens up capabilities for precision landing on hazardous terrain. Fittingly, this effort won the 2023 AIAA Guidance, Navigation, and Control Best Paper Award.
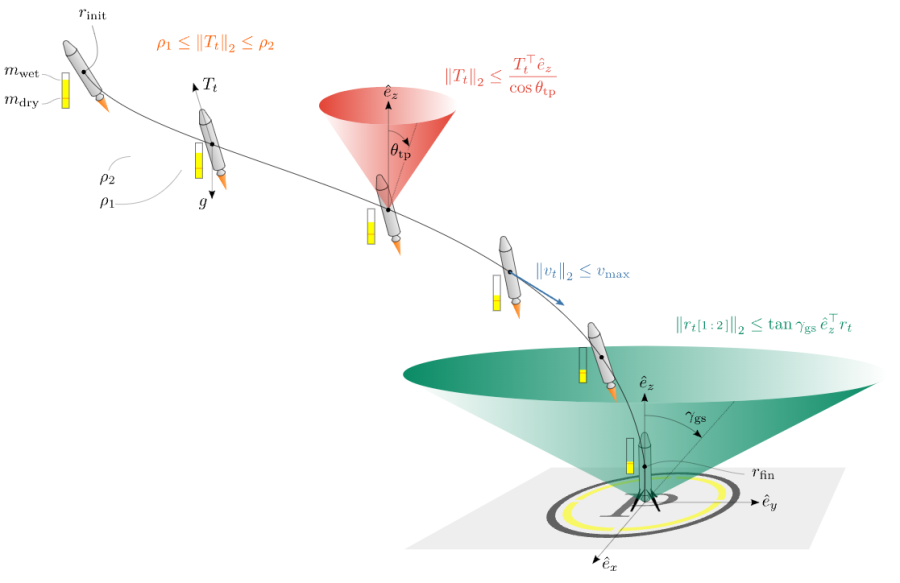
PDG algorithms generally aim to optimize fuel consumption or the maneuver time while satisfying various constraints. Kamath explains, “In many practical applications, such as the landing of first-stage rocket boosters on Earth (like those of SpaceX, for example), you want to have a PDG algorithm that is both reliable and extremely fast to execute. Really, you want it to run in real-time (typically sub-second) onboard the flight computer, to empower the rocket to autonomously compute its trajectory to the landing site and ensure a safe touchdown.”
He continues, “Real-time performance is necessary because it is nearly impossible to accurately predict the location, speed, and orientation of the rocket at the instant powered-descent needs to be initiated. Further, in the event that a hazard is detected at the original landing site as the rocket descends towards the surface, real-time performance is extremely important to be able to divert to a safer landing site. Onboard computations are also necessary to ensure that potential lapses in wireless communication links between the rocket and the ground station do not lead to mission failure. For Mars landing missions, the only feasible solution is to perform the computations autonomously onboard the rocket system, since two-way communication between Earth and Mars takes several minutes.”

“The most compelling aspect of this research to me is how it encompasses both the layer of high-level trajectory optimization by SCP and that of the low-level convex optimizer by PIPG. It is the effective combination of both layers that I believe is key to break the barrier of 1-second.”


“Sequential convex programming applied to real-world problems has changed the game for trajectory optimization due to its speed and reliability. This work to harness the real-time potential of these algorithms through customization of the solver pushes the limit on what is possible for embedding instantaneous constraint information in the mission planning process.”
Modern planetary landings required a new method

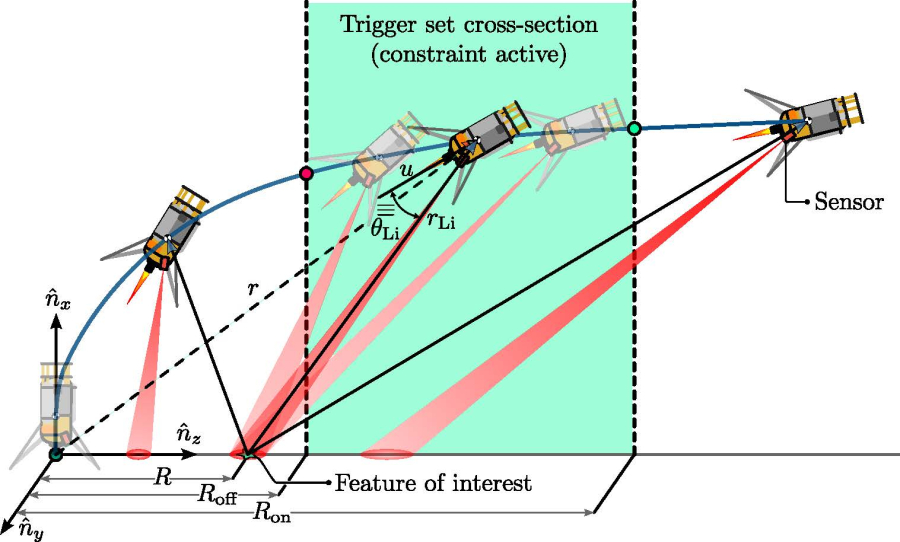
Modern planetary landing missions on unknown surfaces require “terrain-relative navigation” (TRN) and “hazard detection and avoidance” (HDA) executed on-board which requires the spacecraft to create visuals of the surface.
Elango explains, “The 3-DoF approach worked well enough in landing scenarios where precision was not important. But now as we’re trying to land with high accuracy at designated sites with unknown terrain, we are using cameras or LiDAR to focus on the landing sites in real-time to inform the spacecraft about safe regions. This capability requires high-fidelity modeling of the spacecraft’s attitude as well as translation.”
In response to this challenge, then-A&A doctoral students Taylor Reynolds, Michael (Miki) Szmuk, and Danylo Malyuta developed the dual quaternion-based 6-DoF powered-descent guidance (DQG) algorithm with Mesbahi and Açıkmeşe. This algorithm effectively addresses state-triggered constraints and is well-suited for real-time implementation on computationally constrained flight hardware. NASA selected this algorithm for PDG in its SPLICE program.

“The success of the solver shows how an innovation in mathematical optimization and solutions leads to groundbreaking technologies in space systems. It tells a simple yet powerful message: engineering breakthroughs often come from bridging the gap between theory and application. Contributing to this project is undoubtedly my proudest achievement as an aerospace engineer.”
The award-winning new method for speed and simplicity
With the successful execution of onboard spacecraft decisions in less than one second, we have not only broken the barriers of powered-descent guidance but also paved the way for landing on uncharted celestial bodies. ”
The DQG algorithm demonstrated impressive capabilities, but encountered two major challenges: code size and execution time. The existing NASA solver, also co-developed by A&A researchers, consisted of a large codebase with over 600,000 lines and it was slow to execute on the flight computer, which is far from ideal for real-time safety-critical applications.
To overcome these challenges, our A&A research team, led by Abhi Kamath, developed the sequential conic optimization (SeCO) framework. This innovative framework combines sequential convex programming and first-order conic optimization, eliminating the need for matrix factorizations and inversions. By leveraging the PIPG solver and exploiting the structure of trajectory optimization problems, the SeCO framework achieves significantly faster execution times, and the reliance on simple linear algebra operations reduces code complexity, making it more manageable to verify and validate.

The SeCO solver is capable of solving optimal control problems in milliseconds, surpassing the speed of state-of-the-art solvers. In onboard testing with NASA's SPLICE flight computer, the algorithm broke the long-elusive one-second barrier, meeting NASA’s requirement for real-time precision landing. The reduction in execution time by over 5x and the substantial decrease in code size by two orders of magnitude make the SeCO framework a true game-changer for rocket landing guidance.
NASA plans to conduct flight tests of this algorithm in a closed-loop fashion onboard the Astrobotic/Masten Xogdor rocket in 2025 as part of the SPLICE flight campaign. This will further validate the effectiveness and reliability of the SeCO framework in real-world scenarios.
Of this accomplishment and award, Açıkmeşe says, "With the successful execution of onboard spacecraft decisions in less than one second, we have not only broken the barriers of powered-descent guidance but also paved the way for landing on uncharted celestial bodies. This groundbreaking achievement is a testament to the relentless pursuit of innovation and excellence by our team, and it is an honor to receive the 2023 AIAA Guidance, Navigation, and Control Best Paper Award for our efforts."

“Our ability in formalizing complex constrained guidance problems in six-degrees of freedom, and then solving them using highly efficient algorithms developed by our team, open up an unprecedented capability for the conception, design, and development of current and future lunar and planetary missions. I am so proud of how our UW team has put its significant marks on the development of this critical space systems technology.”