Convex Optimization
We develop efficient robust numerical methods and software to solve convex optimization problems resulting from control applications.
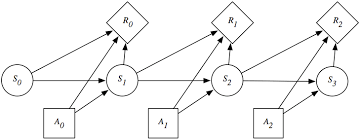
Markov Decision Processes
We design efficient distributed optimization algorithms based on various dynamic systems.

Swarms
We develop optimal trajectory generation methods for distributed autonomous systems.
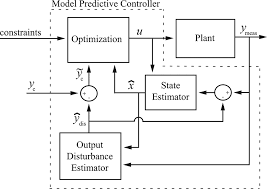
Model Predictive Control
We use a model of the control system and solve relevant optimal control problems via real-time optimization algorithms.